



大族精密传动谐波减速器团队以理论计算及有限元分析为基础,结合尖端的检测系统获取海量的测试数据利用多目标回归优化手段,成功突破双圆弧的非标设计难点,研发出具有突破性的谐波减速产品。
应用范围
半导体加工设备、机器人、通讯设备、航空航天、医疗设备、检测分析设备
技术特点
大族精密传动谐波减速器团队以理论计算及有限元分析为基础,结合尖端的检测系统获取海量的测试数据,利用多目标回归优化手段,成功突破双圆弧的非标设计难点,研发出具有突破性的谐波减速产品。
•
•
•
•
谐波传动原理
1、谐波齿轮传动起源
谐波齿轮传动是美国发明家C.W.Musser于1955年发明创造的,它是一种利用柔性工作构件的弹性形变进行运动或动力传递的一种新型传动方式,它突破了机械传动采用刚性构件机构的模式,使用了一个柔性构件来实现机械传动,从而获得了一系列其他传动所难以达到的特殊功能。由于中间柔性构件的变形过程基本上是一个对称的谐波,故而得名。除前苏联把这种传动称为波形传动或柔性轮传动外,美、英、 德、日等国均称为“谐波传动”。
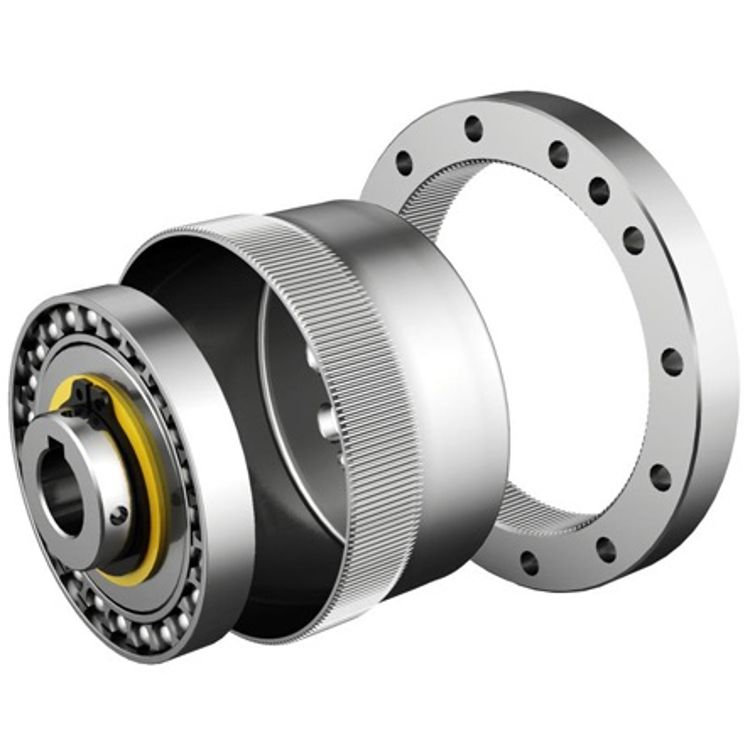
2、谐波齿轮传动装置的构成
§ 刚轮:刚性的内齿轮,一般情况下比柔轮多2齿,通常固定在机壳上;
§ 柔轮:开口部外圈带有齿轮的薄杯型金属弹性部件,它随波发生器的转动而变形,通常与输出轴联接;
§ 波发生器:由一个椭圆形凸轮和一个柔性轴承组成,通常与输入轴相联。柔性轴承内圈固定在凸轮上,外圈可通过滚珠实施弹性形变成椭圆形。
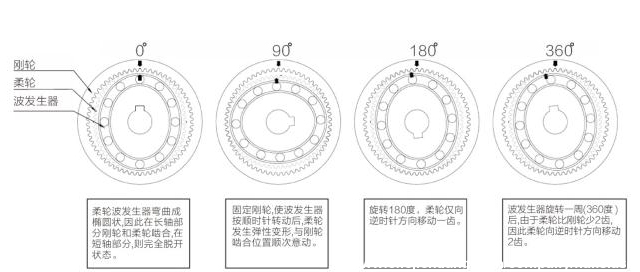
3、谐波齿轮传动减速原理
它是利用柔轮、刚轮和波发生器的相对运动,主要是柔轮的可控弹性变形来实现运动和动力传递的。波发生器内的椭圆形凸轮在柔轮内旋转使柔轮产生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入啮合时,短轴两端处的柔轮轮齿与刚轮轮齿脱 开。对于波发生器长轴和短轴之间的齿,沿柔轮和刚轮周长的不同区段内处于逐渐进入啮合的半啮合状态,称为啮入;处于逐渐退出啮合的半啮合状态,称为啮出。当波发生器的连续转动时,柔轮不断产生形变,使两轮轮齿在啮入、啮合、啮出和脱开四种运动不断改变各自原来的工作状态,产生错齿运动,实现了主动波发生器到柔轮的运动传递。
产品编号规则说明

§ HM我司英文名 Hans Motion缩写
柔轮形状分为杯型(CUP)和礼帽型(Hat)两类。杯型柔轮用大写字母C表示,礼帽型柔轮用大写H表示 。柔轮长度分为标准、短筒两类。标准柔轮用大写字母S表示,短筒柔轮用大写字母D表示
§ 型号对应谐波齿轮的节圆直径,两者的对应关系如下表所示:
|
规格代号 |
14 |
17 |
20 |
25 |
32 |
|
谐波齿轮节圆直径 |
35.6 |
43.2 |
50.8 |
63.5 |
81.3 |
§ 谐波齿轮减速器的减速比一般采用30、50、80、100、120等
§ 谐波齿轮减速器的结构分为组合型、组件型两大类,如表格:
|
代号\类型 |
杯形(组合型和组件型) |
帽形组合型 |
|
Ⅰ |
组件型即三件套组件型 |
组合型(中空轴) |
|
Ⅱ |
组合型集成了十字交叉滚子轴承 |
简易组合型(标准型) |
|
Ⅲ |
—— |
简易组合型(中空轴) |
|
Ⅳ |
—— |
组合型(输入轴) |
§ 形状、性能等特殊规格 空白=标准品,用SP表示。
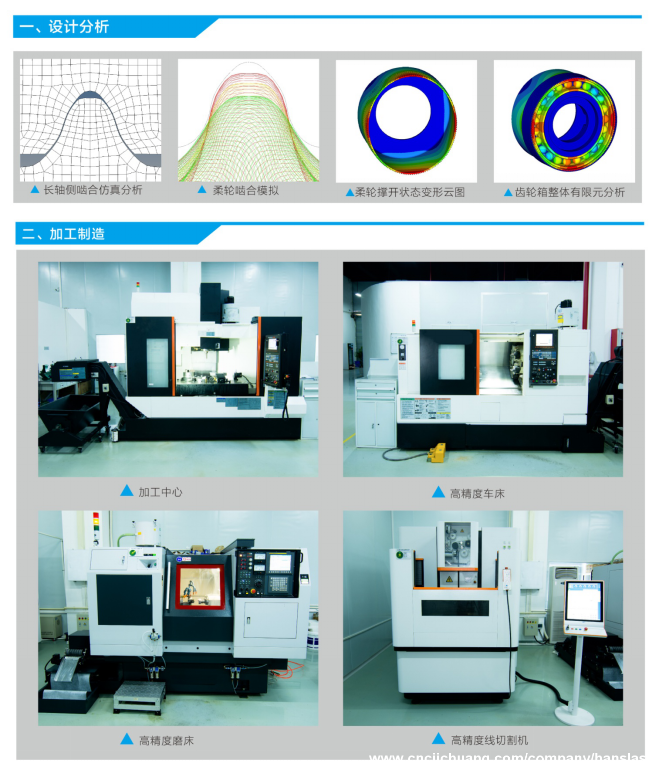
研发流程

1011061863@qq.com






