


两年一度的CIMT2019已圆满落幕,结合本届展会中境内外磁性测量系统展品情况,笔者将近年来磁性测量系统在我国调结构和转型升级过程中发生的深刻变化和发展趋势加以总结,以期同广大科技人员及业界人士进行探讨,供业界读者参考。
1、磁性测量系统的分类与组成
磁性测量系统由于其抗震、防尘、防水、抗污染以及工作温度范围宽广、体积小、安装方便等显著优势,在自动化各个领域广受青睐。尤其近年来,世界电子技术及纳米技术迅猛发展,使磁性测量技术产生了质的变化。磁性测量系统不但更小、更细、更精确,且应用领域更宽广。
一个完整的磁性测量系统主要由磁性传感器、信号处理电路和被测标的组成。为了适应各种不同的应用场合和需求,磁性传感系统可根据测量原理对磁性传感器以及被测标的进行不同的分类。
从测量原理上看,主要分增量磁性测量系统和绝对值磁性测量系统:
增量磁性测量系统通过连续相对位移进行测量,目前常见的栅距有0.5mm、1mm、 2mm、2.5mm、5mm、10mm 等。在其他条件不变的情况下,栅距越小所能获得的最高分辨率及最高精度越高,但同时对安装条件(即磁头磁尺之间的间隙)要求也越苛刻。增量磁性测量系统分辨率也从0.1μm到1mm不等。增量磁性测量系统的输出信号主要有方波(数字量)和正余弦波(模拟量)两种,而方波信号根据信号电平高低又分为TTL 和 HTL。
德国Willtec的数字量增量磁头有:IMS1、IMS2、IMS2.54、IMS5、IMS10、IMS20等。数字量信号的磁性测量系统多用于各类加工机床、步进电机及直线电机反馈系统。
而模拟量增量磁头有:IMV1、IMV2、IMV2.54、IMV5。模拟量磁性测量系统多用于伺服电机反馈系统。增量磁性测量系统相对于绝对值磁性测量系统具有以下特点:体积相对更小、成本更低、通用性更强、测量长度基本不受限。目前数字量磁性传感系统的应用最为广泛,在各工业领域用于测量位移和角度等。
绝对值磁性测量系统经初始化设定后,可直接读取被测标的上任意一点的当前位置,即使在断电后位置发生变化的情况下,也不会造成当前位置值丢失或出错。根据绝对值的编码不同,目前常见的有三种:
(1) 游标码。游标码由两个或多个磁道构成。假设基准磁道磁极距为P,极对数为n,那么第一个游标磁道的栅距为P*(n-1)/n,极对数为n-1,以此类推,每个磁道的周期数都比上一个少1。如德国Willtec的绝对值磁头AHP1和AHP2就是这种类型。
这种磁性游标绝对值测量系统可以达到较高的测量精度,体积较小,测量长度相对较短,但可以通过增加磁道来大幅度增加测量长度。多应用于安装空间狭小的高精度测量领域,如机械手臂。
(2)二进制/格雷码/格雷余码。传统的绝对值测量多为这个方法,由2-3个磁道组成,其中一个为基准磁道,用于产生增量信号,一般常见的为1mm或2mm磁极距。另外1-2个磁道为绝对值编码,和基准磁道组合提供绝对值位置。如 Willtec 的 AMS2,这种磁性绝对值测量系统具有中等测量长度,价格适中。多应用于可靠性要求高或中长距离测量领域,如电梯、仓储定位。
(3)配置偶极磁铁测量。配置圆形偶极磁铁(S+N),即360度范围内只有一个信号周期,可直接得到单圈绝对值位置。这种磁编结构简单,体积小,成本极低,多用于要求较低的阀门开度控制及电机反馈。
磁性绝对值测量系统实际应用中可以一般通过内置的计数器和外接/内置电池来进行圈数计数,以此来实现多圈绝对值角度测量,或成倍延长绝对值直线测量长度。一体式磁性编码器中还可以通过纯物理齿轮结构,在多个磁性码盘中进行切换来测量多圈绝对位置,这种编码器也被称作“真”绝对值编码器。
2、磁性传感器类型
从磁性传感器类型上来看,主要分为电感式传感器、霍尔传感器和磁阻传感器:
电感式(Inductive)磁性传感器,具有高灵敏度、高精度,可试用的磁场强度范围广的优点,但测量长度受限,分辨率越高,测量长度越短,且不适合高速测量。电感式传感器又可分为可变磁阻式、差动变压器式和电涡流式传感器。
霍尔(Hall)磁性传感器历史悠久,市场开发应用也极为成熟。N型硅和砷化镓霍尔传感器主要适用于高强度磁场的测量,而较为新型的锑化铟(InSb)霍尔传感器灵敏度更高,可测量中等强度的磁场范围,但极易受温度变化影响。霍尔传感器的低成本适用于简单的线性及角度测量和用作磁性开关。
磁阻(Magneto Resistive)传感器由于其高灵敏度、高精度、抗干扰性强等优点,越来越受市场青睐。随着磁阻效应基础研发不断涌现出新的成果,磁阻传感器的类别和应用范围也得到了极大扩展。目前能用于长度角度等测量定位的磁阻传感器有:AMR(各向异性磁阻)、GMR(巨磁阻)和TMR(隧道磁阻)。
AMR传感器的最佳性能磁场范围是以地磁为中心的中等强度磁场,因此无需像霍尔元件那样增加聚磁辅助手段。AMR可以对地磁场范围内的弱磁场进行很好的测量,在地球磁场作为基本操作空间的情况下,应用基本无局限性。可用作各种位移、角度、转速的测量,也可用于地磁导航及一些铁磁性物体如火车、汽车、飞机等的检测。AMR 具有高频、低噪和高信噪比等特性。
相比 AMR,巨磁阻传感器 GMR适合测量中高磁场强度,具有更高的灵敏度和更好的温度稳定性,但生产工艺较为复杂,成本较高。目前 GMR 集中应用在磁盘数据读取磁头、存储器领域和测量定位。作为位置传感器,GMR 适用于制作齿轮传感器,通过集成辅助的偏置磁铁,可直接读取铁磁材料的齿形结构。例如 GLM700系列制成的齿轮编码器常用于高精度电主轴控制等。
隧道磁阻TMR 传感器是近几年才开始工业化应用的新型磁阻效应传感器。TMR具有灵敏度极高、功耗低、测量范围极广等优势。目前在硬盘磁头领域已逐步取代 GMR,在测量领域应用的前景也很广阔,如TL900系列。
3、编码器类型
从被测标的类型上来看,可分为传统磁性编码器和齿轮编码器:
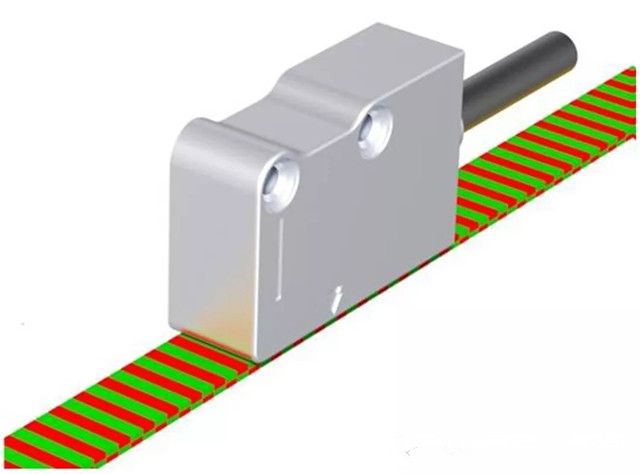
传统的磁性编码器测量对象为带有磁性编码的磁尺或磁环,磁性传感器可直接读取磁尺或磁环上形成的磁场。
齿轮传感器的测量对象是铁磁材料的齿形结构,例如齿轮、螺纹、齿条等。齿轮传感器由巨磁阻传感器和偏置磁铁组成,传感器本身能产生磁场。因此被齿形铁磁材料进行磁场切割后,可以得到测量所需的磁场强度变化。
相比传统磁性编码器,齿轮编码器的优势在于:(1)能达到更高的测量精度,因为目前金属加工所能达到的精度要高于磁性材料的充磁精度。(2)在某些应用中,可以直接在传动部件上加工精密的齿纹,避免任何因安装而产生的背隙或误差。
而齿轮编码器的局限性在于:(1)对齿形结构的材料及齿形的加工有着较为严格的要求。(2)齿轮传感器与被测齿形之间的间隙要小于1/3 齿距。相较于传统的磁性编码器<1/2栅距的安装间隙,齿轮编码器的安装要求更高。
齿轮编码器主要应用于加工机床的位置检测、AC电机及电主轴位置反馈、电梯的位置反馈等。
4、结语
综上所述,一个完整的高精度、高速度、高稳定性的磁性测量系统是由传感器、带补偿的细分、驱动电路以及高精度的被测标的等诸多因素组合而成,这里涉及到材料、制作工艺、电子元器件搭配、电路设计、软硬件等若干方面,而各零部件包括被测标的制造厂家各自有自己的专利产品及专有技术。因此,如何能够生产出符合工业生产所需求的高品质产品,就需要根据实际细分应用将各种零部件(含软件)通过取长补短进行优势整合,而不是简单地拿来拼凑组合,这是当今磁性测量系统行业里面临的重大课题。根据实际应用的需求,各生产企业应尽快制定出若干产品标准,以此优势来主导整个产业链合作生产,是掌握产品主动权的重要任务,也是全球化合作的趋势。(朗祺自动化)






